
Researchers make progress in hybrid actuated variable stiffness
2025/02/18The variable stiffness technology shows its versatility in soft robotics and healthcare applications, such as compliant grippers, wearables, and exoskeletons. However, current mechanisms are limited by reliance on a single actuation source and a lack of theoretical understanding of the complicated mechanical behaviors, further impeding their broader application in robotics.
Associate Professor Hongqiang Wang’s research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech), in collaborating with Professor Hongliang Ren’s group from the Chinese University of Hong Kong (CUHK), has introduced groundbreaking advancements that address these limitations and expand the potential applications of variable stiffness technology.
Their work, titled “Augment Laminar Jamming Variable Stiffness Through Electroadhesion and Vacuum Actuation”, has been published in IEEE Transactions on Robotics (T-Ro), one of the top journals in the field of robotics.
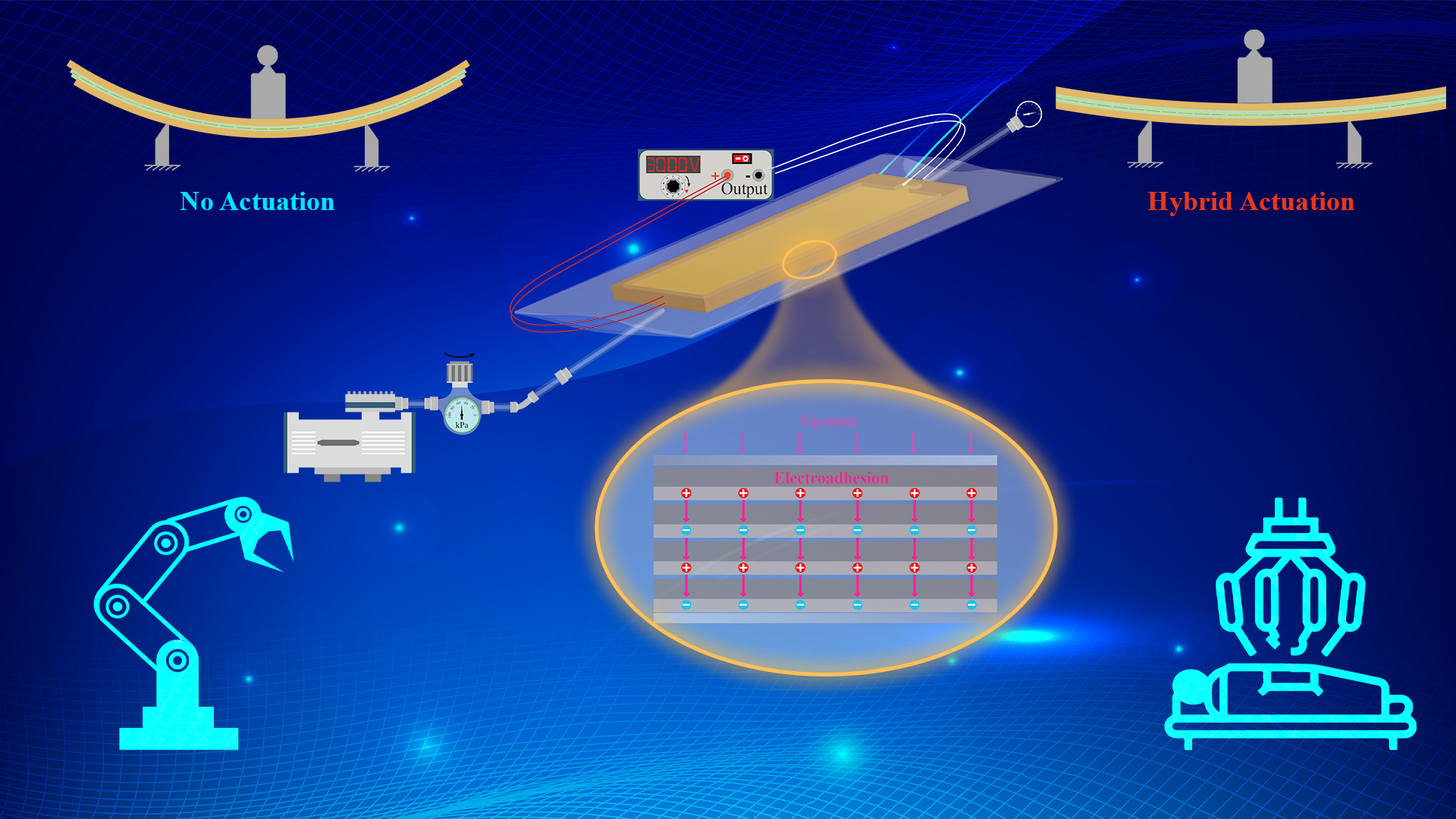
The researchers proposed an electroadhesion (EA)-vacuum hybrid actuated laminar jamming device (Figure 1) by stacking and encapsulating electrode films. A lightweight ten-layer structure (weighing less than 5 grams and thinner than 1 mm) achieved a 75-fold theoretical stiffness ratio. By analyzing interlayer sliding behaviors, they developed a complete mechanical model that explains both linear and nonlinear behaviors. This model was further extended to its general form, making it applicable to different actuation methods.
In addition, a comprehensive model-based parametrical analysis (Figure 2) was conducted, considering material properties, structural dimensions, and actuation mechanisms.

Figure 1. Schematic of hybrid actuated laminar jamming for variable stiffness.

(a)

(b)
Figure 2. Model-based parametrical analysis for (a) stiffness and (b) force.
In this study, three-point bending characterization revealed a 36% and 27% increase in the force of hybrid-actuated two- and four-layer structures compared to single-driven counterparts. The theoretical model accurately predicted a series of mechanical behaviors with errors below 2% (Figure 3). A model-based feedforward control further validated its accuracy, demonstrating a fast response speed (5 ms) and low power consumption (140 mW), benefitted by hybrid actuation. The results indicate the advantages of hybrid actuation mechanisms over single-driven ones, exhibiting a preliminary synergistic effect.

(a)

(b)
Figure 3. Performance characterization of hybrid actuated laminar jamming. (a) Force and stiffness characterization of two and four-layer structures; (b) Theoretical and experimental comparison in force and deformation at the point of interest.
To further investigate the coupled vacuum-EA field relationship and the synergistic effect in performance improvements, experiments were conducted to characterize the impact of EA/vacuum on air gap thickness. The results showed an increased trend in breakdown voltage with the addition of the vacuum component (Figure 4). Consequently, the proposed vacuum-EA hybrid actuation not only breaks through the atmosphere limitation of vacuum actuation but also increases 23% in the breakdown voltage of EA.

Figure 4. Coupled vacuum-EA relationship and synergistic effect.
Visiting scholar at SUSTech Cheng Chen is the first author of this paper. Associate Professor Hongqiang Wang is the corresponding author, with Professor Hongliang Ren also contributing to this work. SUSTech is the first affiliated institution.